
引言
在学习NeRF(Neural Radiance Fields)的过程中,我记录了一些关键概念和思考。本文将分享我的学习心得,帮助大家理解NeRF的工作原理。
1. 模型输入输出的思考
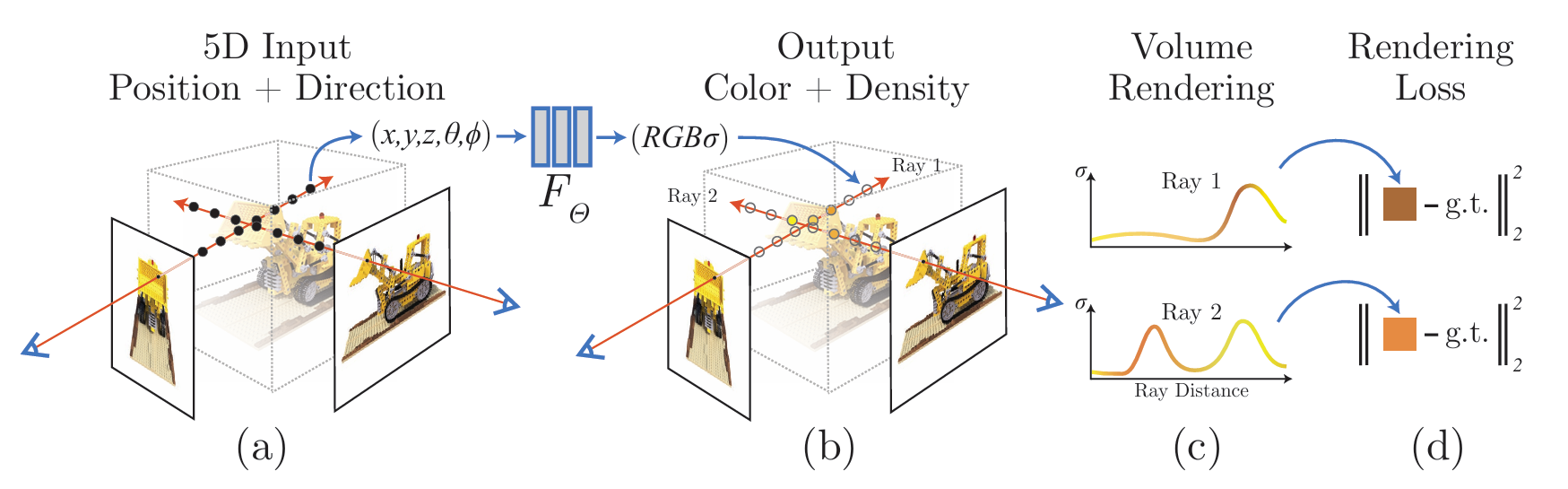
最初,我对NeRF的输入输出产生了疑问:为什么输入是5D向量而不是图片?图片中为什么会有theta和phi这些值?4D向量又是如何变成图片的?
经过思考,我意识到这中间应该有两个关键步骤:
- 图片转5维的前处理
- 4维转图片的后处理
这里需要特别说明的是,5D向量和4D向量都是针对粒子的表示。5D向量表示粒子的位置(x,y,z)和视角方向(θ,φ),4D向量表示粒子的颜色(RGB)和密度(σ)。
2. 体渲染原理
NeRF的核心是体渲染(Volume Rendering)技术。在这个过程中,光线与粒子发生相互作用:
- 吸收:光子被粒子吸收
- 放射:粒子本身发光
- 外射光:光泽在冲击后被弹射
- 内射光:其他方向弹射来的粒子
NeRF基于以下假设:
- 物体是一团自发光的粒子
- 每个粒子都有密度和颜色
- 外射光和内射光相互抵消
- 多个粒子被渲染成指定角度的图片
理解这个后,又有新的问题了:图片是怎么得到这些粒子的,同时这些粒子又是怎么渲染成新的图片的?这涉及到两个关键过程:从图片和相机位姿计算射线,从射线上采样粒子;以及通过体渲染将粒子渲染成新的图片。
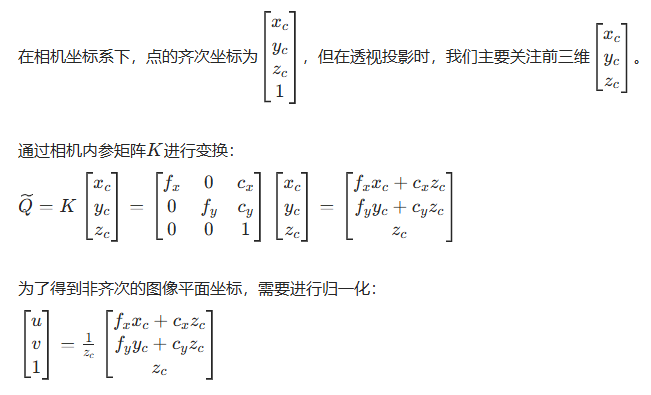
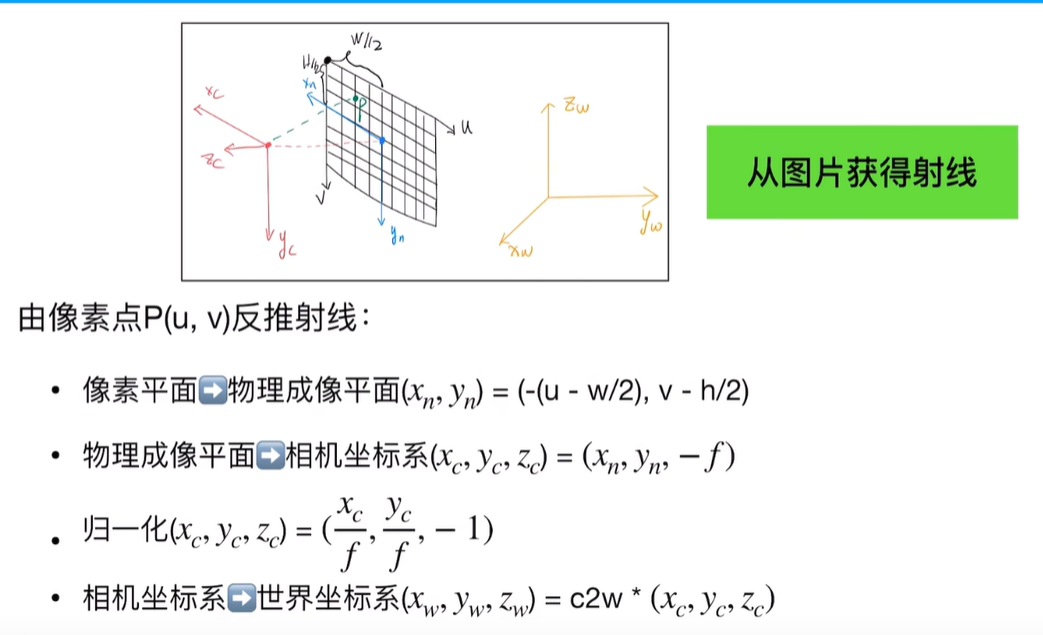
3. 相机模型与坐标转换
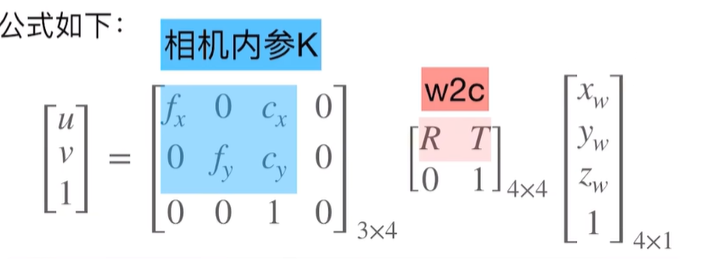
这个公式好像不太对,我查阅了相关资料,应该按下面这种理解(公式打不出来,只能以图片形式展示了)
4. 射线采样与模型结构
对于图片上的每个像素,我们可以将其看作沿着某条射线上的无数个发光点的和。这个射线可以表示为:rt=o+td,其中o是射线原点,d为方向,t为距离。在极坐标表示中,理论上t可以从零到正无穷。
在实现中:
- 设置near=2,far=6
- 在near和far之间均匀采样64个点
- 训练时,一张图取1024个像素
- 得到1024条射线,每条射线上采样64个粒子
- 共1024x64个粒子,以batch形式输入模型
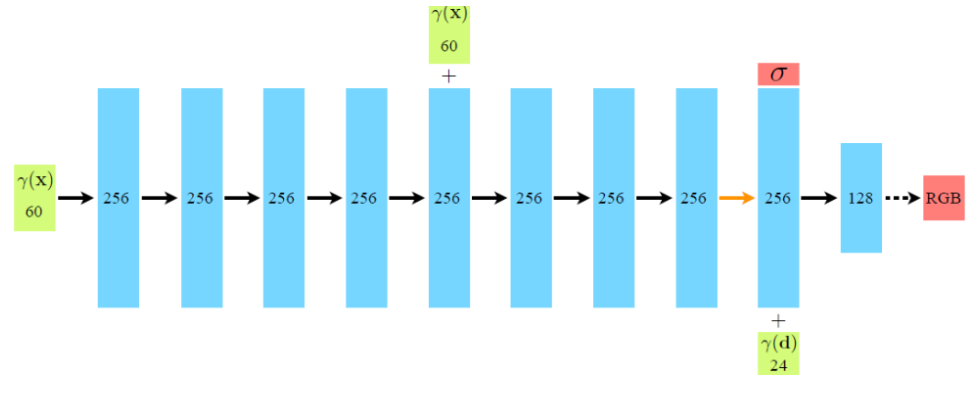
模型结构:
- 8层全连接层
- 半路再次输入位置坐标
- 后半路输出密度和方向视角
- 最后输出颜色RGB
5. 位置编码
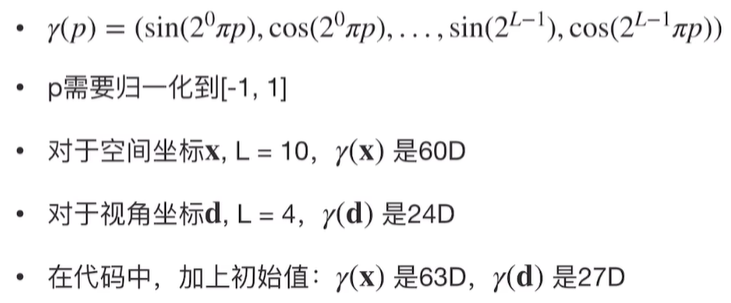
当实验时发现只输入3d位置和3d视角,建模结果细节丢失,缺乏高频信息。为了改善模型性能,该方法引入了位置编码。对于空间坐标(x,y,z),每个坐标用sin和cos表示,L从0到10,所以一个坐标有20维,三个坐标共60维。同理,视角坐标得到24维。
为什么空间坐标参数是10,视角坐标参数是6?论文论证了观测方向不应当影响密度,但会改变颜色,这可能是因为x,y,z对高频信息的影响更大。
6. 损失函数与体渲染
损失函数采用自监督方式:
- 真实值(GT)是图片某一像素的RGB
- 预测值是该像素对应光线的粒子颜色和
- 使用MSE计算损失
- 其中r是每个batch的射线,一共1024条
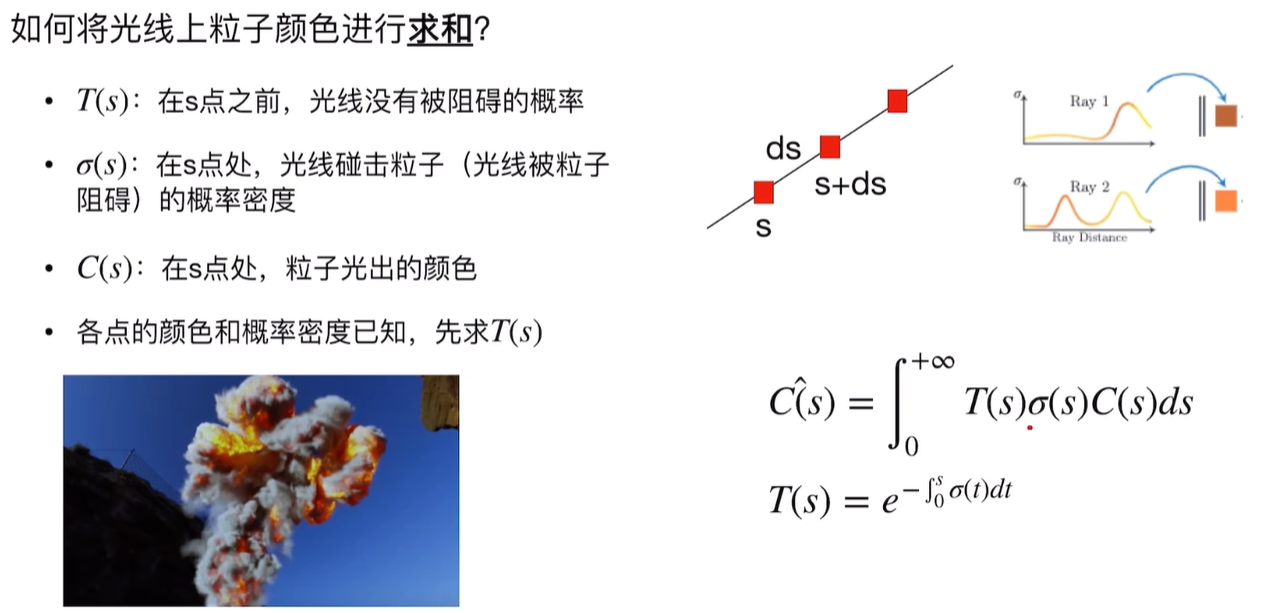
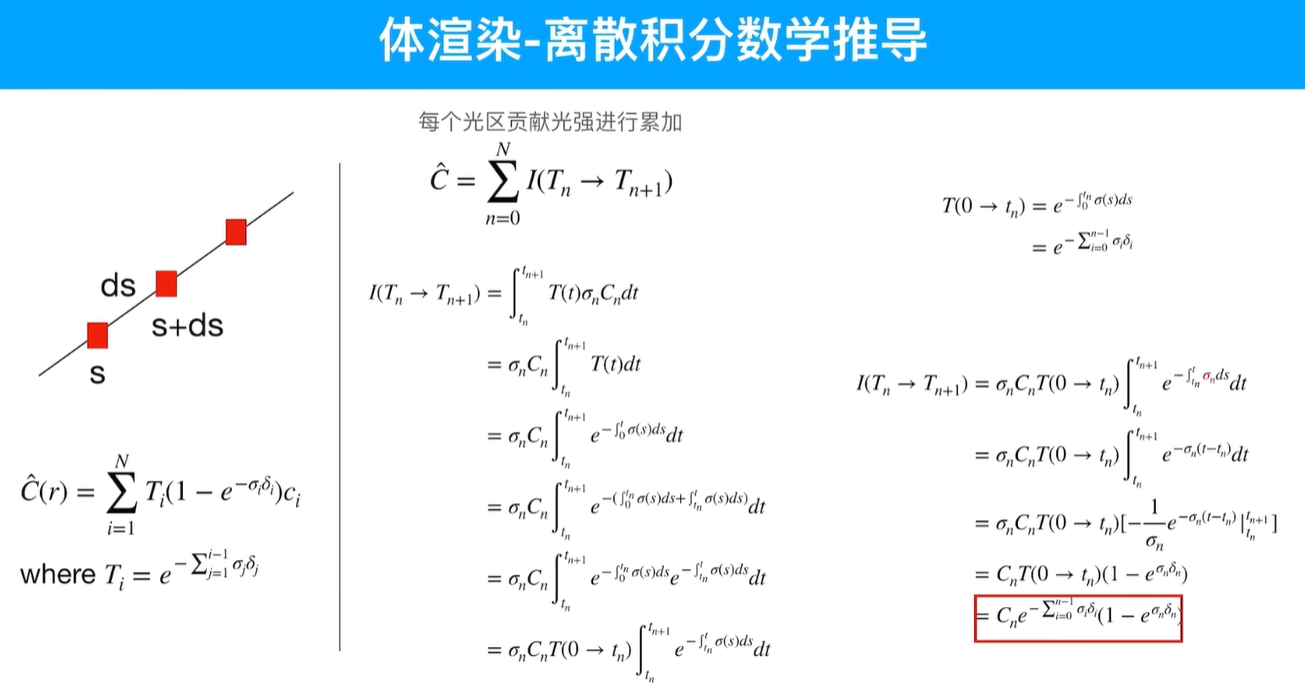
体渲染采用连续积分方式:
- 渲染颜色是叠加效果
- 每个点的不透明度与体密度和颜色相乘
- 对射线上的所有粒子进行连续积
- 每个颜色的密度和颜色是已知的,去算光线没被阻碍的概率
求和公式如下:
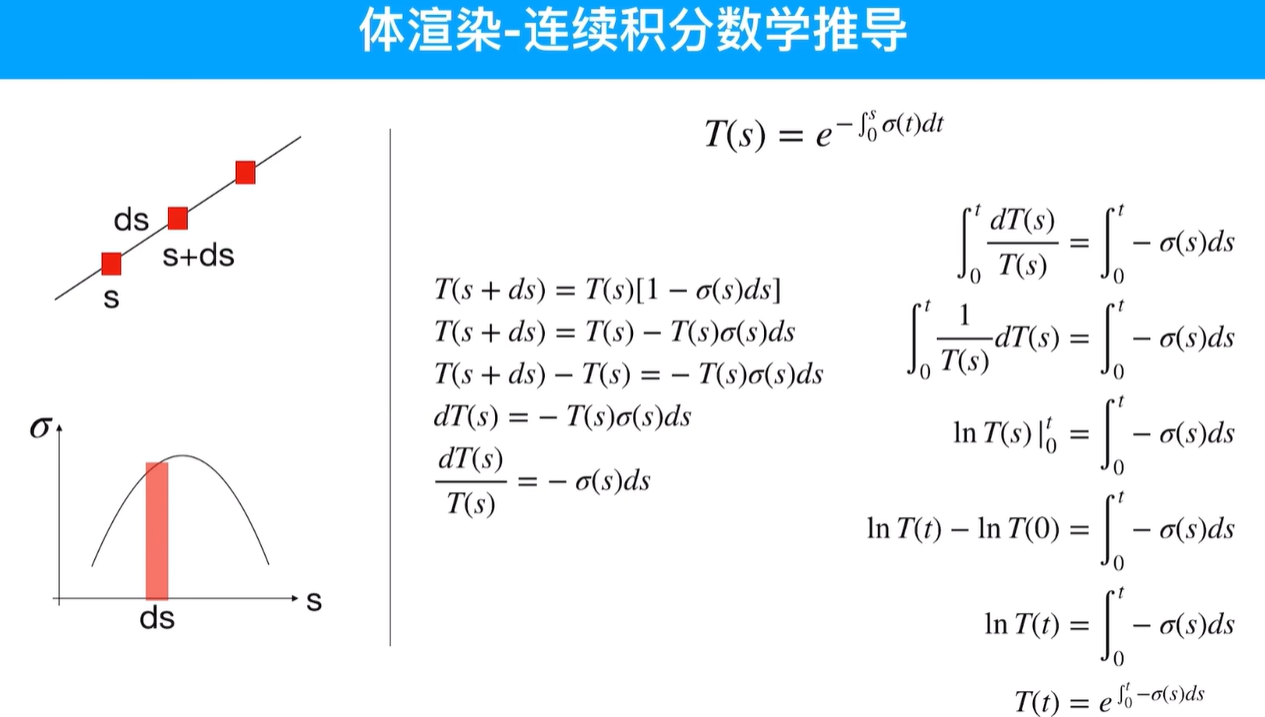
下面的推导过程:
当然计算机只能进行离散化处理:
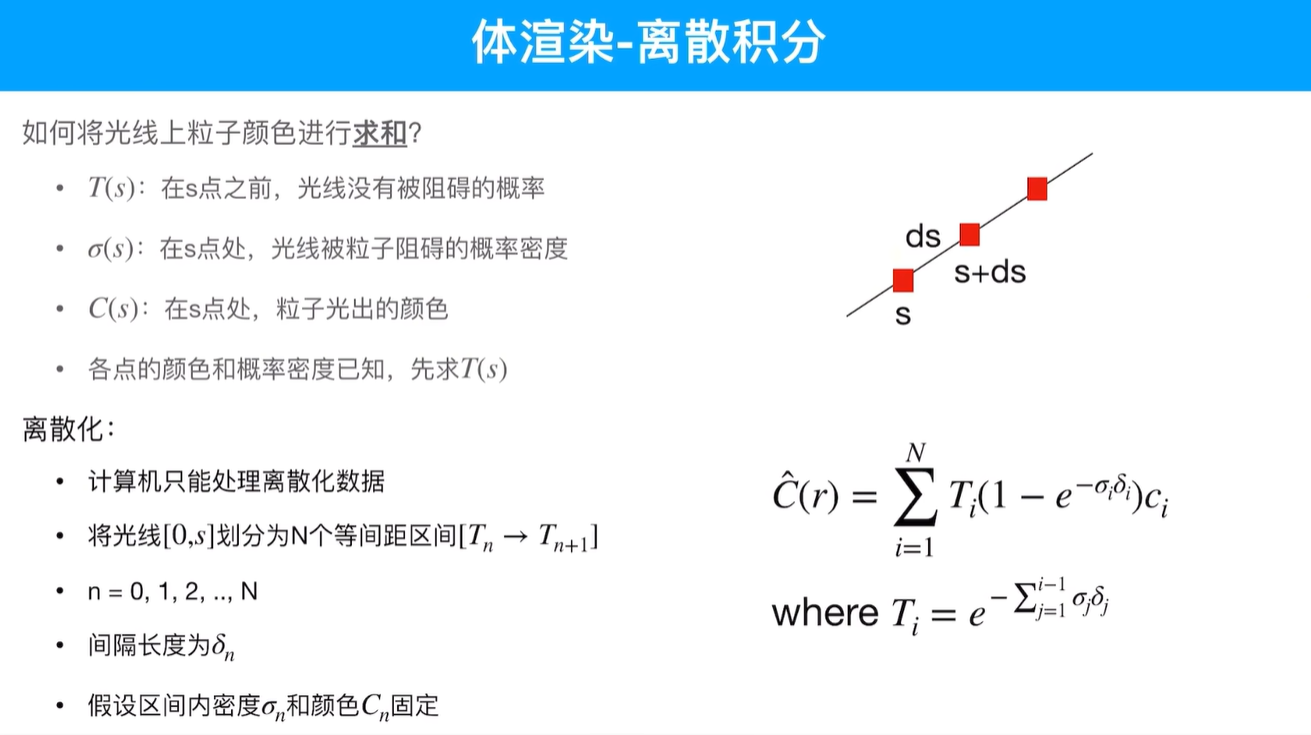
推导过程如下:
从图片反推射线如下:
7. 采样优化
为了提高效率,文章中采用了两阶段采样策略:
- 粗模型:均匀采样
- 细模型:根据密度二次采样
具体实现:
- 使用两个8层MLP
- 根据粗模型的结果进行逆变换采样
- 每条光线重新采样128个粒子
- 与之前的64个粒子合并,共192个粒子
这种方法可以确保在有效区域进行更密集的采样,而在无效区域(如空白区域和遮挡区域)减少采样。具体来说,无效区域比如空白区域和遮挡区域进行均匀采样,我们希望有效区域多采样,无效区域少采样或者不采样。
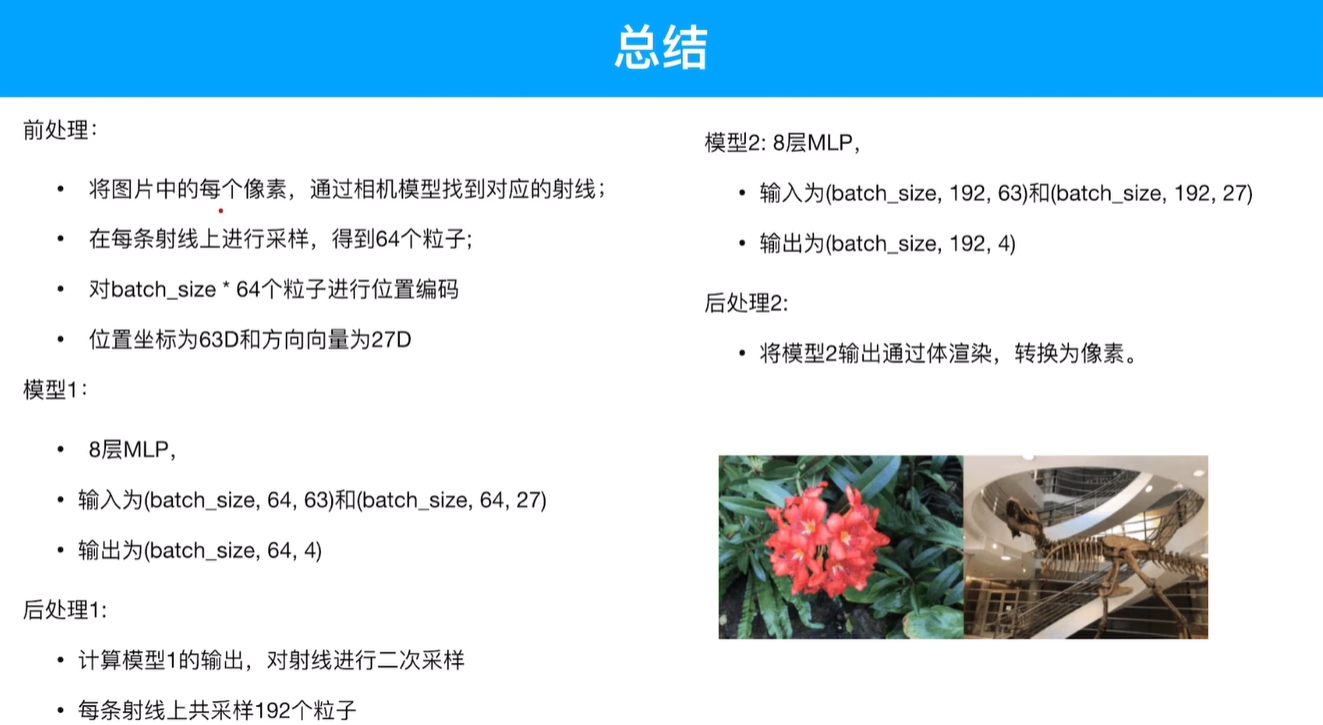
8. 总结
参考资料
- 《NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis》
- 【较真系列】讲人话-NeRF全解(原理+代码+公式)@Bilibili